|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
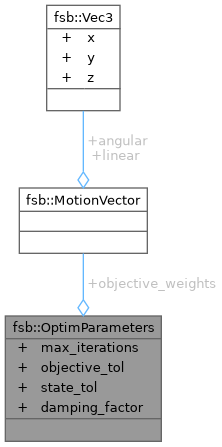
Public Attributes | |
| size_t | max_iterations = 100U |
| Maximum number of iterations. | |
| Real | objective_tol = 1.0e-12 |
| Objective function error tolerance for convergence. | |
| Real | state_tol = 1.0e-12 |
| State vector error tolerance for convergence. | |
| Real | damping_factor = 0.001 |
| Damping factor for Levenberg-Marquardt algorithm. | |
| MotionVector | objective_weights |
| Cartesian weights for objective function. | |