FancySafeBot
0.0.1
A safe robotics library
Loading...
Searching...
No Matches
Public Attributes
|
List of all members
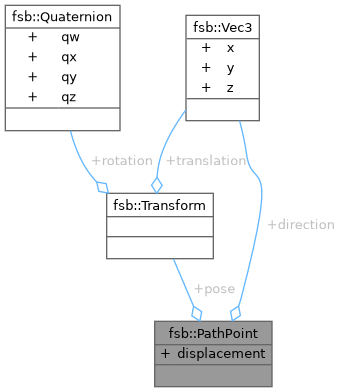
fsb::PathPoint Struct Reference
Cartesian Path
Collaboration diagram for fsb::PathPoint:
Public Attributes
Transform
pose
=
transform_identity
()
Real
displacement
= 0.0
Vec3
direction
= {}
The documentation for this struct was generated from the following file:
fsb-core/include/
fsb_trajectory_path.h
fsb
PathPoint