|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
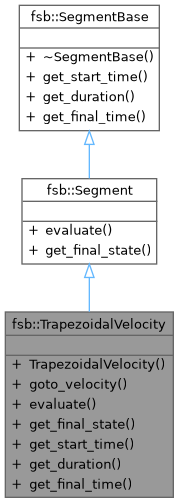
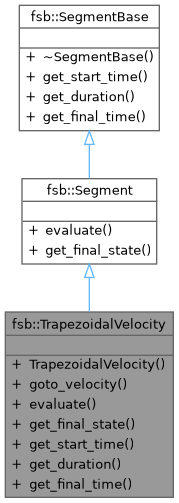
Trapezoidal velocity motion profile
#include <fsb_trapezoidal_velocity.h>
Public Member Functions | |
| TrapezoidalStatus | goto_velocity (Real start_time, const TrajState &initial_state, Real final_velocity, Real final_acceleration, Real max_acceleration, Real max_jerk) |
| Goto target velocity. | |
| TrajState | evaluate (Real t_eval) const override |
| Evaluate trajectory. | |
| TrajState | get_final_state () const override |
| Get final state of segment. | |
| Real | get_start_time () const override |
| Get start time of segment. | |
| Real | get_duration () const override |
| Get total duration. | |
| Real | get_final_time () const override |
| Get final time of trajectory. | |
|
overridevirtual |
Evaluate trajectory.
| t_eval | Evaluation time |
Implements fsb::Segment.
|
inlineoverridevirtual |
|
inlineoverridevirtual |
|
inlineoverridevirtual |
|
inlineoverridevirtual |
| TrapezoidalStatus fsb::TrapezoidalVelocity::goto_velocity | ( | Real | start_time, |
| const TrajState & | initial_state, | ||
| Real | final_velocity, | ||
| Real | final_acceleration, | ||
| Real | max_acceleration, | ||
| Real | max_jerk | ||
| ) |
Goto target velocity.
| start_time | |
| initial_state | |
| final_velocity | |
| final_acceleration | |
| max_acceleration | |
| max_jerk |