|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
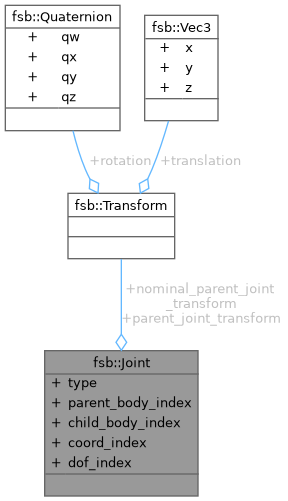
Joint definition structure.
#include <fsb_joint.h>
Public Attributes | |
| JointType | type = JointType::FIXED |
| Joint type. | |
| bool | reversed = false |
| Reversed direction of the joint axis. | |
| Transform | parent_joint_transform = transform_identity() |
| Joint pose with respect to the parent body with offset from parent body. | |
| Transform | nominal_parent_joint_transform = transform_identity() |
| Joint pose with respect to the parent body without offset. | |
| size_t | parent_body_index = 0 |
| Index of model parent body to which the joint is attached. | |
| size_t | child_body_index = 0 |
| Index of model child body to which the joint is connected. | |
| size_t | coord_index = 0 |
Index of the joint's first generalized coordinate in the model joint space position vector JointSpacePosition. | |
| size_t | dof_index = 0 |
Index of the joint's first differential generalized coordinate in the model joint space vector JointSpace. | |