|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
Joint position, velocity and acceleration
#include <fsb_joint.h>
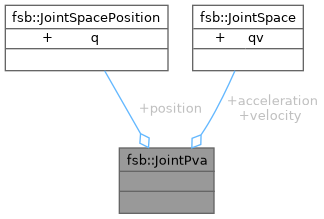
Public Attributes | |
| JointSpacePosition | position = {} |
| Joint position. | |
| JointSpace | velocity = {} |
| Joint velocity. | |
| JointSpace | acceleration = {} |
| Joint acceleration. | |