|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
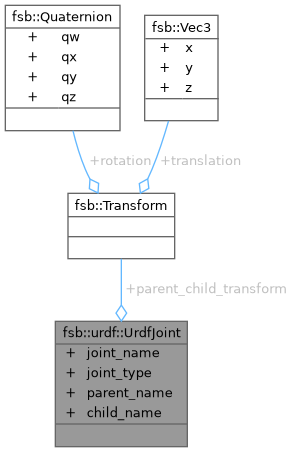
Structure representing a URDF joint.
#include <fsb_urdf_joint.h>
Public Attributes | |
| std::string | joint_name |
| JointType | joint_type = JointType::FIXED |
| std::string | parent_name |
| std::string | child_name |
| Transform | parent_child_transform = {} |
| UrdfJointLimits | limits = {} |
| bool | reversed = false |
| reversed direction of the joint axis | |
| std::string fsb::urdf::UrdfJoint::child_name |
Name of the child link
| std::string fsb::urdf::UrdfJoint::joint_name |
Name of the joint
| JointType fsb::urdf::UrdfJoint::joint_type = JointType::FIXED |
Type of joint
| UrdfJointLimits fsb::urdf::UrdfJoint::limits = {} |
Joint limits
| std::string fsb::urdf::UrdfJoint::parent_name |
Name of the parent link