|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
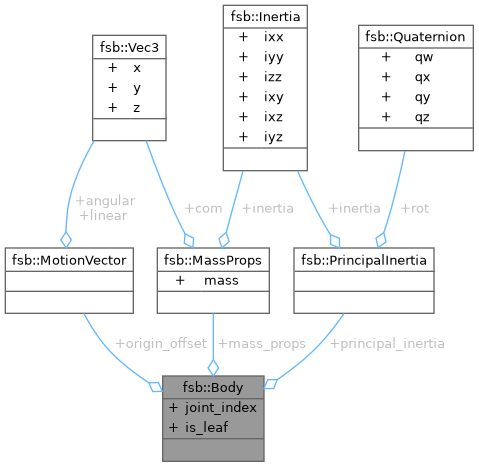
Link body parameters.
#include <fsb_body.h>
Public Attributes | |
| MotionVector | origin_offset = {} |
| Transform offset of from nominal body origin. | |
| MassProps | mass_props = {} |
| Mass properties of body. | |
| PrincipalInertia | principal_inertia = {} |
| Principal inertia of body. | |
| size_t | joint_index = 0 |
| Index of parent joint. | |
| bool | is_leaf = true |
| true if body is leaf (no children) | |