|
FancySafeBot 0.0.1
A safe robotics library
|
|
FancySafeBot 0.0.1
A safe robotics library
|
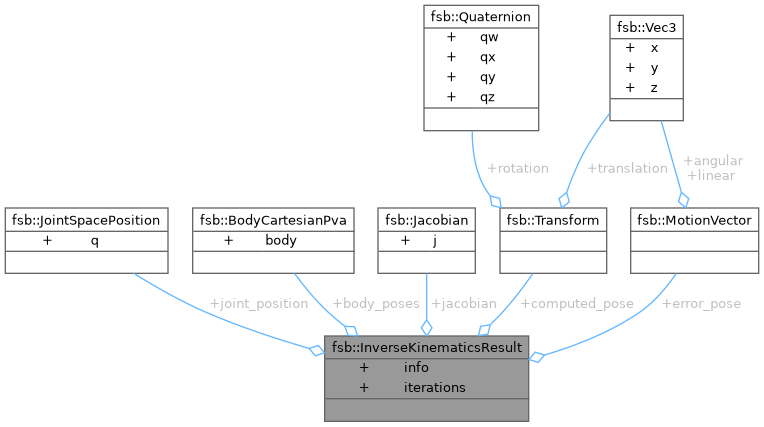
Public Attributes | |
| InverseKinematicsInfo | info = InverseKinematicsInfo::INVALID_INPUT |
| Convergence information. | |
| JointSpacePosition | joint_position = {} |
| Joint position. | |
| BodyCartesianPva | body_poses = {} |
| Body poses. | |
| Jacobian | jacobian = {} |
| Jacobian matrix. | |
| Transform | computed_pose = {} |
| Computed end-effector pose. | |
| MotionVector | error_pose = {} |
| Error between computed and desired pose. | |
| size_t | iterations = 0 |
| Number of iterations. | |